学生管理系统
数据库
侧边栏显示隐藏
android studio
libbinder
少儿编程
寒武纪笔试
土地分类
macos
软件定义汽车
正射矫正
iVX
AI作画
如何修复网站漏洞
PCB设计
Junit使用的基本流程
QSS
LabVIEW开发
verilog
应力强度因子



相关文章

leetCode-hot100-动态规划专题
动态规划 动态规划定义动态规划的核心思想动态规划的基本特征动态规划的基本思路例题322.零钱兑换53.最大子数组和72.编辑距离139.单词拆分62.不同路径63.不同路径Ⅱ64.最小路径和70.爬楼梯121.买卖股票的最佳时机152.乘积最大子数组 动态规划定义
动态规划(Dynami…
IT之旅启航:高考后IT专业预习全攻略
✨作者主页: Mr.Zwq✔️个人简介:一个正在努力学技术的Python领域创作者,擅长爬虫,逆向,全栈方向,专注基础和实战分享,欢迎咨询! 您的点赞、关注、收藏、评论,是对我最大…
![[笔记]小米CyberDog机器狗仿真调试记录](/images/no-images.jpg)
[笔记]小米CyberDog机器狗仿真调试记录
从官方github的所有源码库来看,所有的source命令只有两条,执行它以配置环境变量: source /opt/ros/galactic/setup.bash
source /home/cyberdog_ws/install/setup.bash 如果运行脚本之后gazebo正常启动及机器狗模型在悬空状态,问…

【pytorch14】感知机
单层感知机模型 对于单层的感知机,它的激活函数是一个sigmoid
对于符号的定义做一个规范化,输入层每一层进行一个编号
输入是第0层,上标0表示属于输入层,下标0到n表示一共有n个节点(这里严格来说应该是0~n-1,为了书写…
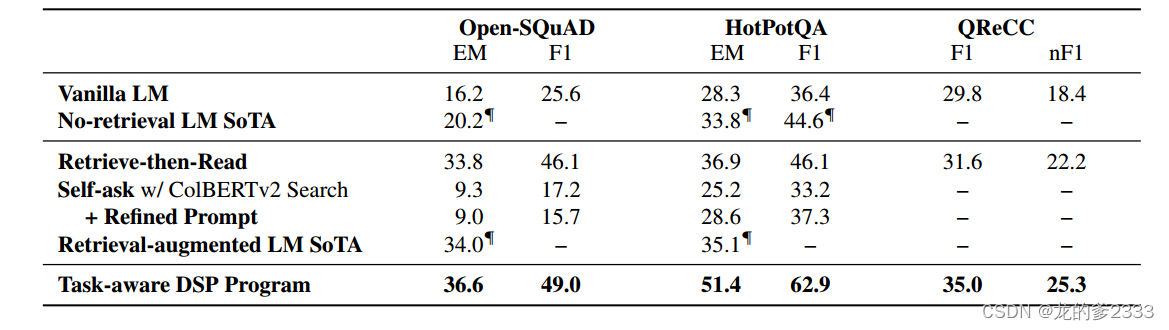
论文翻译 | (DSP)展示-搜索-预测:为知识密集型自然语言处理组合检索和语言模型
摘要 检索增强式上下文学习已经成为一种强大的方法,利用冻结语言模型 (LM) 和检索模型 (RM) 来解决知识密集型任务。现有工作将这些模型结合在简单的“检索-读取”流程中,其中 RM 检索到的段落被插入到 LM 提示中。 为了充分发挥冻结 LM 和 RM 的…

内网穿透--利用everything实现目录映射
免责声明:本文仅做技术交流与学习... 目录
来源文章
frp下载网址
为了隐藏:
演示:
1-靶机的everything开启http服务
2-Linux服务器:
3-靶机windows:
4-最后访问: 来源文章
渗透测试技巧|Everything的利用
frp下载网址
Release v0.58.1 fatedier/frp GitHub 为了隐…
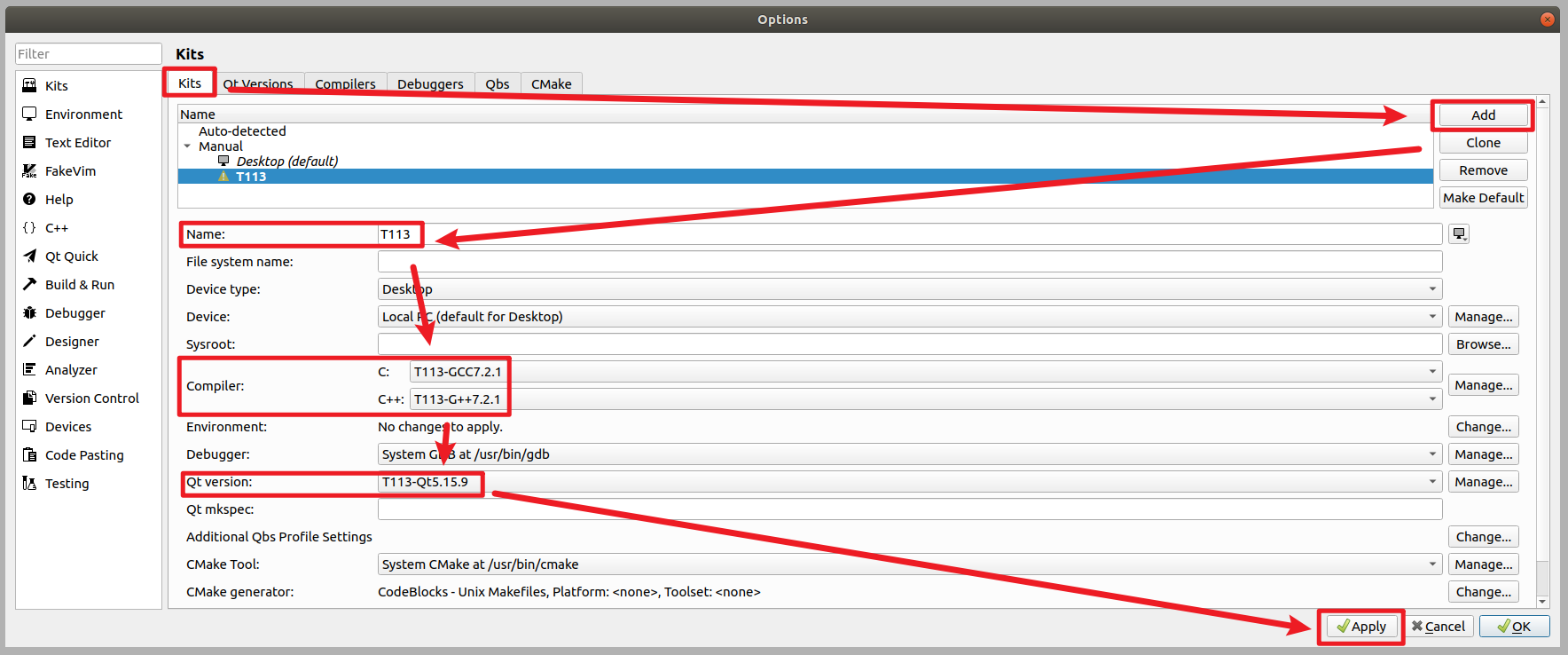
基于ARM的通用的Qt移植思路
文章目录 实验环境介绍一、确认Qt版本二、确认交叉编译工具链三、配置Qt3.1、修改qmake.conf3.2、创建autoConfig.sh配置文件 四、编译安装Qt五、移植Qt安装目录六、配置Qt creator6.1、配置qmake6.2、配置GCC编译器6.3、配置G编译器6.4、配置编译器套件6.5、创建应用 七、总结…
【mybatis】ActiveRecord模式
一、定义与特点
定义:ActiveRecord是一种领域模型模式,特点是一个模型类对应关系型数据库中的一个表,而模型类的一个实例对应表中的一行记录。这种模式最早由Rails框架提出,并逐渐成为许多现代Web开发框架中的标准特性。特点&…
最新文章
- 直击2024 WAIC现场:关于大模型,热情、焦虑与冷静同在
- 第3章 配置 Vite
- python破解字母已知但大小写未知密码
- python爬虫入门(四)之Beautiful Soup库
- 代码随想录算法训练营第五十八天|KMC101 孤岛的总面积、KMC102 沉没孤岛、KMC103 水流问题
- Rust入门实战 编写Minecraft启动器#1启动方法
- 编程高手进
- ASP.NET跨页面传值技巧总结
- - Enjoy...! - Life is short.
- (ICS)的删除与重新安装 --无法识别Windows防火墙
- .Net 平台SerialPort类内部实现探秘
- .net中HashTable的最大容量